ニュースリリース
「BIM/CIM双方向連動自動巡回ロボットシステム
(i-Con Walker)」を開発
2021.04.20
製品サービス
株式会社イクシス(本社:神奈川県川崎市、代表取締役Co-CEO:山崎文敬、狩野高志)は、インフラ関連業界、特に建設業界におけるBIM/CIMを活用した生産性向上の一環として、BIM/CIM上で自動巡回ロボットの行動計画を設計し、かつ自動巡回ロボットが現場環境から取得した情報をBIM/CIMに反映する「BIM/CIM双方向連動自動巡回ロボットシステム(i-Con Walker)(以下「i-Con Walker」という。)」を開発しました。
本技術により、建設各フェーズでの現場の出来高、出来形、点検結果をリアルタイムにBIM/CIM上に反映し各種情報を属性情報に登録・更新することができます。さらに更新されたBIM/CIM上で自動巡回ロボットの行動計画を設計することができ、日々変化する現場環境下においても安定した出来高・維持管理が行えます。
昨今、国土交通省が「ICTの全面的な活用(ICT土工)」等の施策を建設現場に導入することにより、建設生産システム全体の生産性向上を図るi-Construction(アイ・コンストラクション)を推進しており、建設6フェーズ(測量、設計、施工、検査、維持管理、廃棄更新)を3次元モデルに連携・発展させ事業全体での情報共有を図る「BIM/CIM」(BIM:Building Information Modeling、CIM:Construction Information Modeling)が活用されてきています。
「i-Con Walker」は、最新の現況に更新されたBIM/CIMデータ上でロボットが動作する行動計画を、部材に紐づけた中継点を連続的に指定することで設計し、自動巡回ロボットは中継点間をSLAM(Simultaneous Localization and Mapping)技術等を用いて障害物回避をしながら移動し、中継点で指定されたタスク(写真撮影、物資移送、施工、3D出来形計測等)を実施します。
その結果は部材の属性データIFC(Industry Foundation Classes)に反映されます。
これを繰り返すことで一連のタスクを遂行するとともに、BIM/CIMデータを最新情報としてリアルタイムに更新することができ、遠隔地のBIM/CIMのCADソフト上で、それらの状況をリアルタイムに観察することができます。
「i-Con Walker」により設計段階で作成したBIM/CIMデータを、日々の更新により、最終的に出来形BIM/CIMを作成することができ、業務の高度化、生産性の向上に寄与できます。
BIM/CIM双方向連動自動巡回ロボットシステム(i-Con Walker) 動画
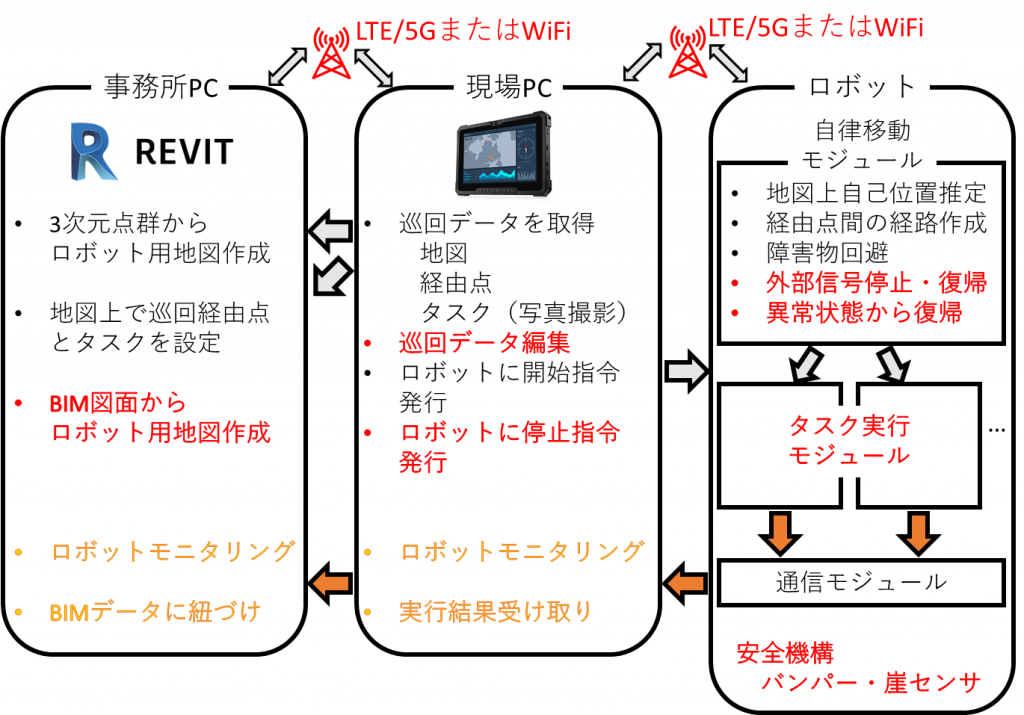
システム構成図

作業フローイメージ
お問い合せ先
株式会社イクシス ビジネス・デベロップメント部門
〒212-0032 神奈川県川崎市幸区新川崎 7-7
かわさき新産業創造センター(AIRBIC)内
電話 :044-589-1500
お問い合わせフォーム:https://www.ixs.co.jp/inquiry
プレスリリース資料
当社プレスリリース