i-Con Walker, Autonomous Mobile Robot System that Links BIM and Real Space in Both Directions, Developed.
2021.04.20
Products
iXs Co., Ltd. (Co-CEOs: Fuminori Yamasaki and Takashi Karino; “iXs”) is pleased to announce the development of i-Con Walker.
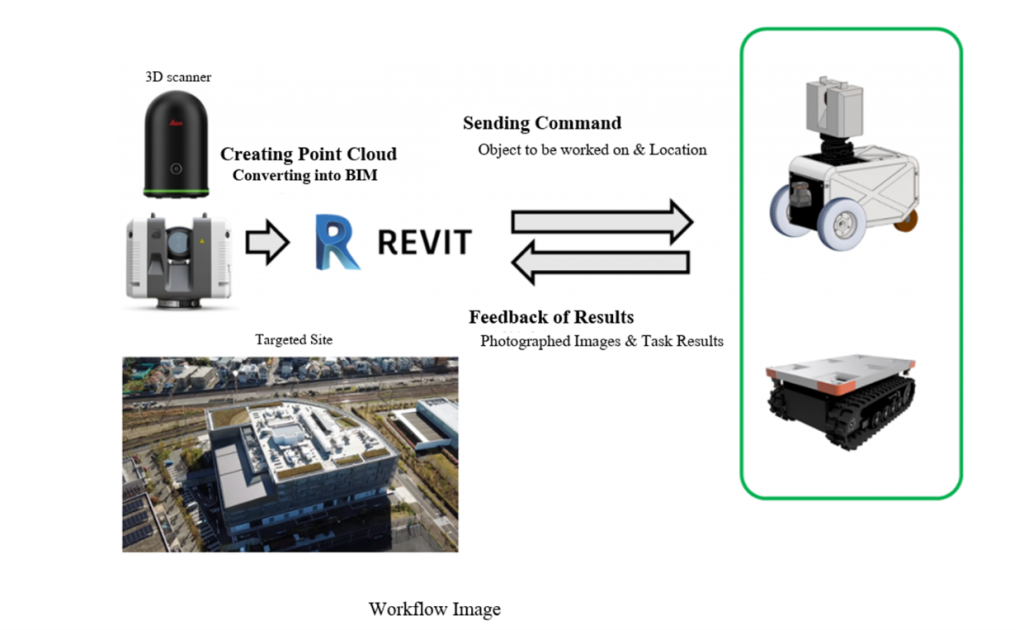
i-Con Walker is an autonomous mobile robot system that bi-directionally links BIM and real space. With this system, one can design action plans for an autonomous mobile robot on BIM and reflect the information acquired by the robot at the sites back into BIM. This is intended to improve productivity by utilizing BIM in infrastructure-related industries, especially in the construction field.
With this technology, the progress status of the construction site, management of whether the completed workpiece is consistent with the blueprints, as well as inspection results in each phase of construction can be reflected in BIM in real time, and various types of information can be registered and updated into attribute information. Furthermore, action plans for autonomous mobile robots can be designed on the updated BIM, ensuring reliable management of ongoing progress and maintenance at ever-changing construction sites.
Recently, the Ministry of Land, Infrastructure, Transport and Tourism (MLIT) has been promoting i-Construction, an initiative to improve the productivity of the entire construction production system by introducing such measures as ” the comprehensive use of ICT (ICT earthwork)” into construction sites. BIM (Building Information Modeling), which links and develops the six phases of construction (survey, design, construction, inspection, maintenance, and disposal/renewal) into a 3D model and shares information throughout the construction project, has been more widely utilized.
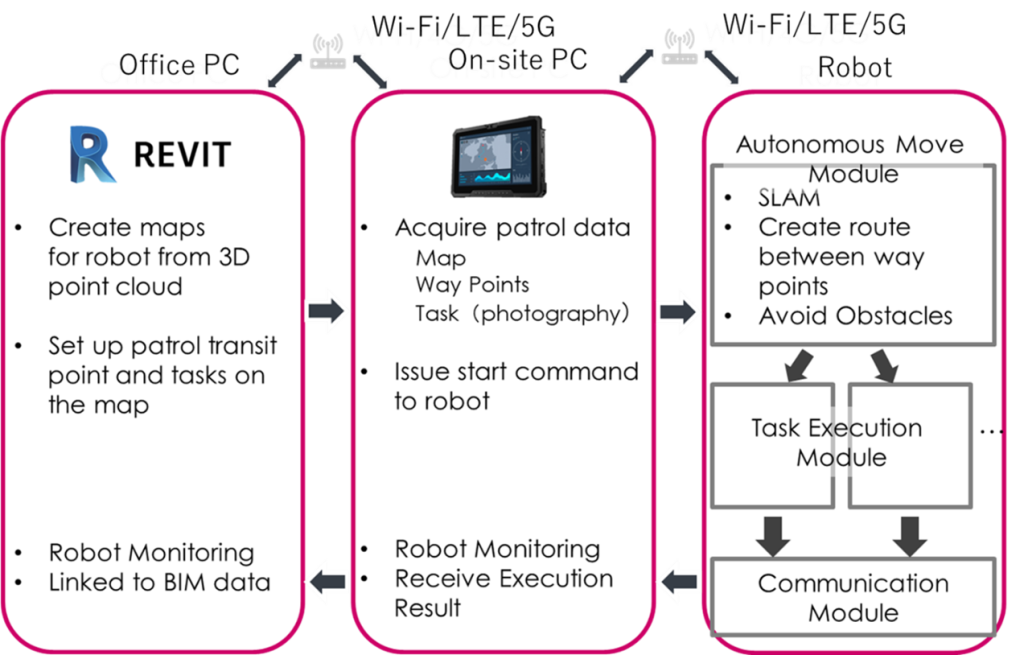
i-Con Walker functions as follows.
First, action plans for the robot to perform are designed on the up-to-date BIM data, by designating a series of waypoints tied to the elements. The autonomous mobile robot moves among waypoints while avoiding obstacles using SLAM (Simultaneous Localization and Mapping) technology, etc., and performs designated tasks (photography, material transfer, construction, 3D measurement of completed products, etc.) at each waypoint. The results are then reflected in the attribute data IFC (Industry Foundation Classes) of the elements. By repeatedly performing this process, a series of tasks are carried out and the BIM data can be updated in real time as the latest information, and these statuses can be monitored remotely on the CAD software of the BIM in real time.
i-Con Walker” makes it possible to replace BIM data created at the design stage, update it on a daily basis, and eventually prepare BIM of the completed structure. This technology can contribute to the enhancement of operations and productivity.
Movie of “i-Con Walker, Autonomous Mobile Robot System that Links BIM and Real Space in Both Directions”(Only Japanese)
For inquiries, please contact,
iXs Co., Ltd. Kawasaki Business Incubation Center AIRBIC 2F Room A32
7-7 Shinkawasaki, Saiwai-ku, Kawasaki-City, Kanagawa 212-0032 Japan
TEL:+81-44-589-1500
Inquiry Form:https://www.ixs.co.jp/inquiry_en