ニュースリリース
自律走行式ひび割れ検査ロボットを開発
ー検査の自動化および 記録書類 作成作業の削減により検査業務の効率化を実現ー
2020.04.06
お知らせ
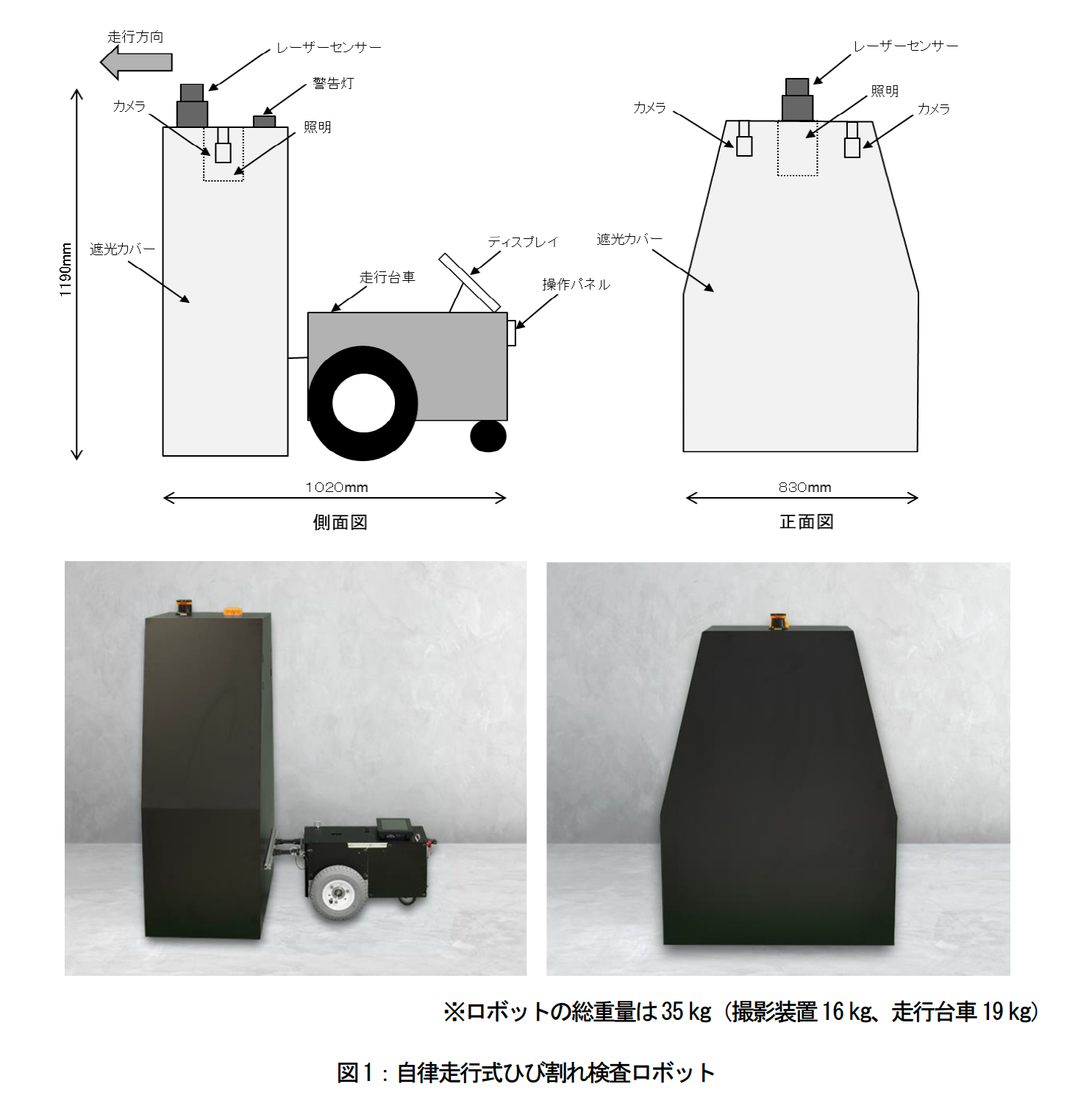
株式会社イクシス(本社:神奈川県川崎市、代表取締役:山崎文敬、狩野高志)と安藤ハザマ(本社:東京都港区、社長:福富正人)とは、「自律走行式ひび割れ検査ロボット」(図1)を開発しました。大空間構造物の床面におけるひび割れ検査において、軽量な走行台車型の検査ロボットが自律走行、自動撮影をおこない、同時にAI(人工知能)により撮影画像からひび割れを検出し、その結果を自動で図面に表示します。
1.開発の背景
大空間構造物の床面施工におけるコンクリートのひび割れ不具合は、竣工時や引渡し後一定期間が経過したのちに検査が必要です。材料の配合調整等によりひび割れの発生は減少傾向にあるものの、これまでの検査方法では、必要な知識を有する検査員が近接目視で実測を行い、その結果を写真やスケッチで記録するため、一連の検査業務に多くの時間がかかっています。
近年、画像認識によるひび割れ検出技術が開発されていますが、その多くは人手をともなう画像取得作業が必要です。さらに取得した画像はその解像度の高さからデータが重く、ひび割れ検出から記録書類の作成に相当の時間を要しており、作業の効率化が求められます。
2.「自律走行式ひび割れ検査ロボット」の特長
今回開発した検査ロボットは、検査の自動化および記録書類作成作業の削減により検査業務の大幅な効率化(従来の近接目視と比較して約40%の時間短縮)を実現するもので、特長は以下のとおりです。
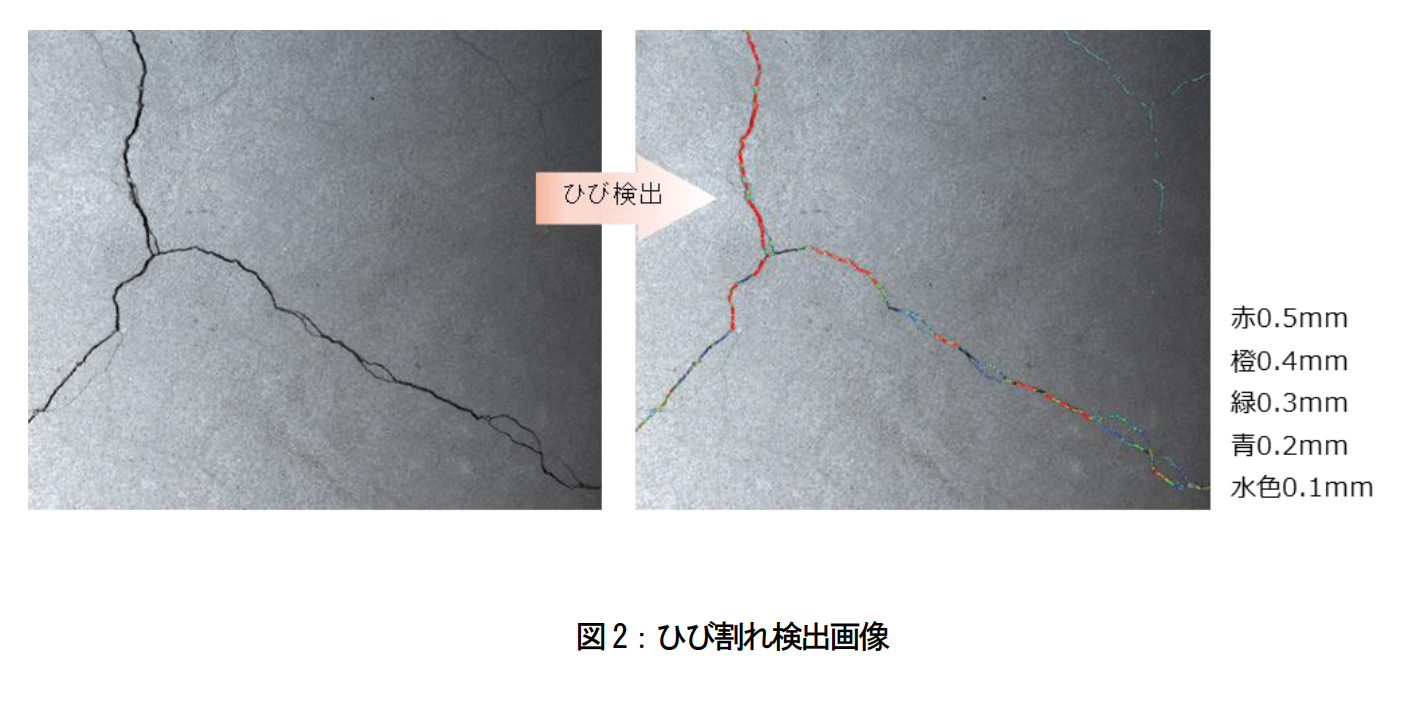
①検査範囲を指定するだけで床全面を一定間隔で撮影し、幅0.1㎜以上のひび割れを0.1mm単位で自動検出します。(図2)また、検出したひび割れは、CAD図面上に幅ごと色分け表示し、出力することが可能です。
②検査ロボット専用の撮影装置は遮光カバーに覆われており、カメラと床面の距離やフラッシュライトによる照明の光量・角度が一定に保たれるため、外的要因に左右されず常に同条件での画像取得が可能となり、画像認識によるひび割れ検出が高精度で実施できます。
③SLAM(注1)による自律走行を行うことにより、柱やその他の障害物を回避しながら1,500㎡を約6時間で検査します。これにより大空間構造物における床面の一定範囲(注2)を一度に検査することができます。
④撮影画像は無線LANによりパソコンに随時転送され、AIにてひび割れ検出をタイムリーに行います。撮影画像をサーバーにアップロードして処理を行うといった手間や時間は不要になるため、走行後ただちに検査結果を図面にプロットし、速やかな記録書類の作成が可能になります。
⑤検査ロボットとパソコンのみで位置情報の取得からひび割れ検出、図面表示まで一連の検査業務を行うことができます。また、検査ロボットは操作が容易であり、全体重量が35㎏と軽量で、さらに撮影装置と走行台車が分離可能なため、容易に持ち運びができます。
3.実機試験
実機試験において検査ロボットで自動検出したひび割れ箇所と、近接目視で実測したひび割れ箇所を比較したところ、幅0.1㎜以上のひび割れに対し、適合率が90%以上となることが確認できました。
4.今後の展開
今後は、この検査ロボットに更なる改良を加え、様々な大空間構造物の工事現場に導入し、検査業務の効率化による生産性向上を目指します。
(注1)SLAM(Simultaneous Localization and Mapping)
レーザーセンサーなどで取得した周辺環境の情報から、自己位置の推定と地図の作成を同時に行うこと。
(注2)大空間構造物における床面の一定範囲
建築基準法施行令第112条 第1項に定められている防火区画(面積区画)。耐火建築物および準耐火建築物は床面積1,500㎡ごとに準耐火構造の床もしくは壁又は特定防火設備で区画しなければならない。