ニュースリリース
BIMデータと連携した自律走行ロボットを共同開発
BIMデータを利用した自己位置認識技術により施工の自動化を目指す
2019.06.19
お知らせ
株式会社イクシス(本社:神奈川県川崎市、代表取締役:山崎文敬、狩野高志)と安藤ハザマ(本社:東京都港区、社長:福富正人)は、建築工事における施工自動化装置の基盤となる「BIM データと連携した自律走行ロボット」(図1 参照)を共同開発しました。
「自律走行ロボット」(以下、「ロボット」)(図2 参照)は、建築工事の施工を自動化する上でロボットが建物内のどの位置に存在しているかを高精度に認識するために開発したもので、その位置を測定するためのプリズム自動追尾型測量機(以下、「測量機」)およびロボットの移動指示と位置確認を行う「位置認識・移動制御システム」(以下、「システム」)(図3 参照)から構成されており、BIM データと連携した自己位置認識技術により制御されています。なお、システムとロボットおよび測量機のデータ交換は、無線LAN により行います。
ロボットの特長は、以下の通りです。
・BIM データと連携した自己位置認識技術を搭載したロボットでSLAM(注1)により自律移動する。
・移動指示はシステムから2 次元座標(X,Y)により行い、ロボットがその位置近傍まで自律走行する。
・ロボットの移動部には全方位台車を採用している。
・ロボット上部の四隅に360°プリズム(以下、「プリズム」)を設置しているため、ロボットの位置を
3 次元座標(X,Y,Z)で確認でき、さらに向きや傾きまで測定が可能。
・測量機は、同時に複数のプリズムを検出できませんが、測量機から検出しやすい1 カ所のプリズムを順次露出し、
それ以外を遮蔽する機構とシステムから測量機の向きを制御する機構により、
複数のプリズムを自動検出することが可能。
・システムの画面に表示されるBIM データ(3 次元モデル)の描画には、ゲームエンジンを採用し、
タブレットや汎用パソコンでも快適な動作が可能。
詳細は以下をご覧ください。
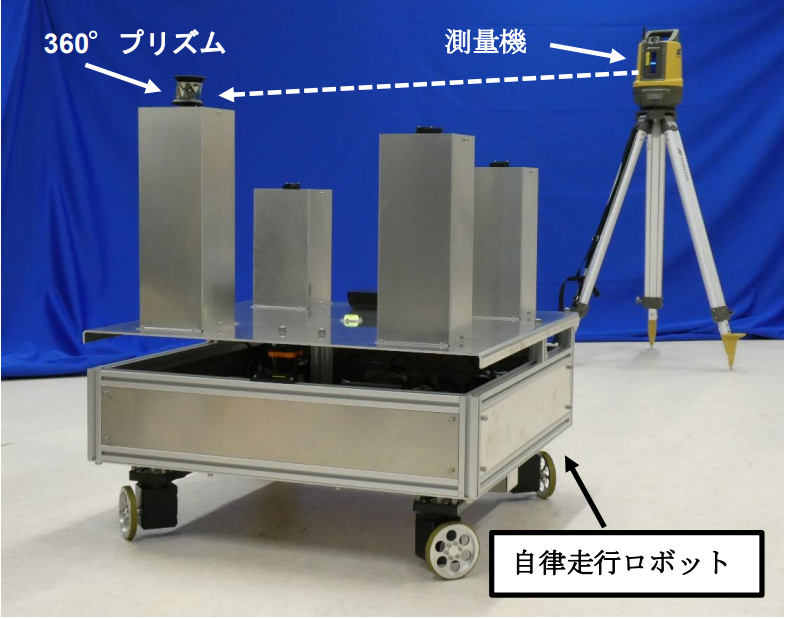
図1:BIM データと連携した自律走行ロボット
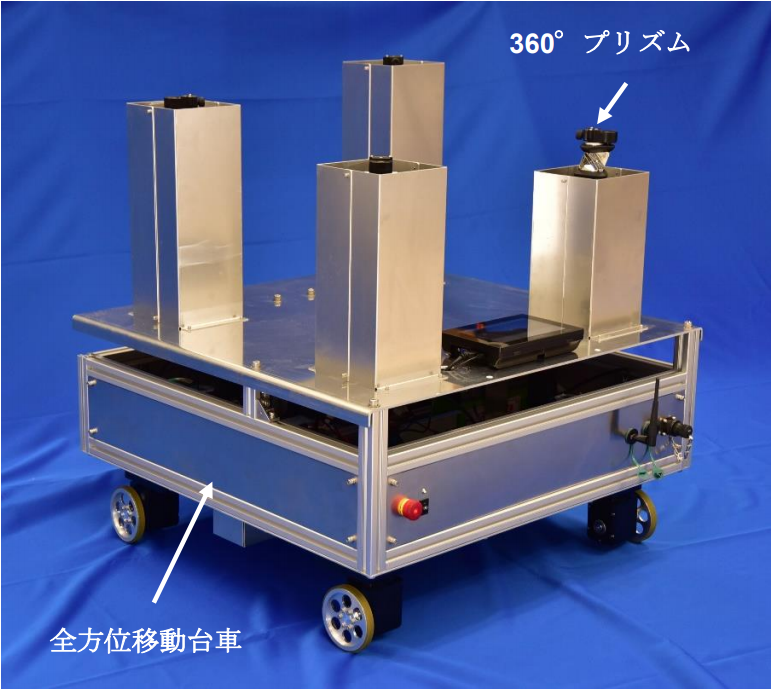
図2:自律走行ロボット
(外形寸法 幅770×奥行770×高さ800mm(プリズム格納時)、重量60kg、走行速度0.5m/秒)
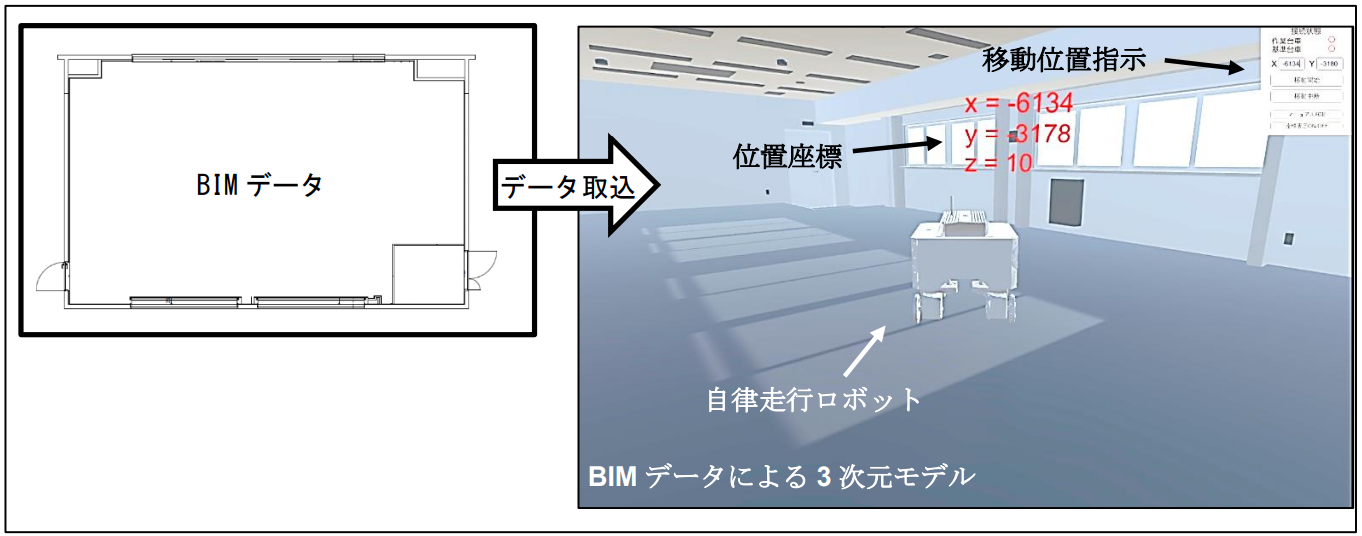
図3:位置認識・移動制御システム