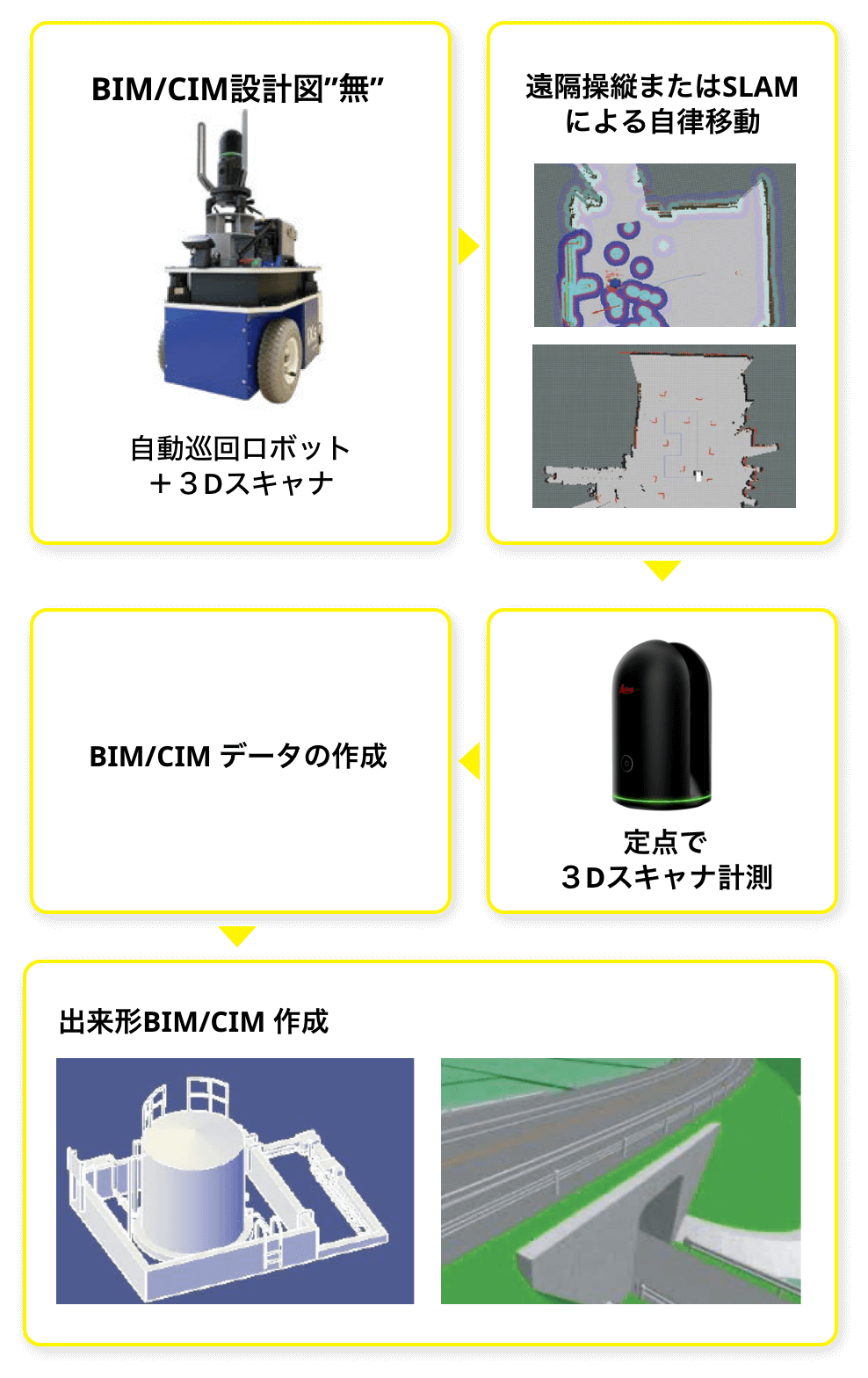
BIM/CIM連携により、導入時の地図作成が不要に。
CADオペレータがロボットの経路とタスクを定義、現場では微調整だけ。
あとはi-Con Walker®が自動でミッションをこなします。
イクシスのコア技術

i-Con Walker®は特定のロボットを示す名称ではありません。BIM/CIMデータを元に走行用の地図を生成し、点検結果をBIM/CIMの属性情報に書き戻す、双方向のデータ連携機能を持ったデジタルツインを体現する巡回システムそのものを指しています。
※BIM/CIM:Building Information Modeling / Construction Information Modeling / Managementの略
※i-Con Walker®は株式会社イクシスの登録商標です。
FEATURE i-Con Walker®の基本機能
REAL-TIME
LINKAGE
BIM/CIM 空間と現場を双方向で
リアルタイム連携
AUTONOMOUS
MOVE
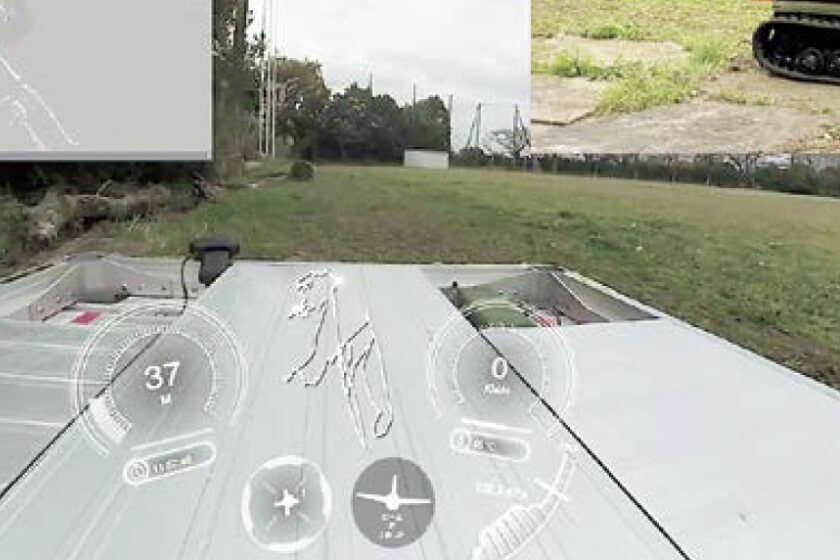
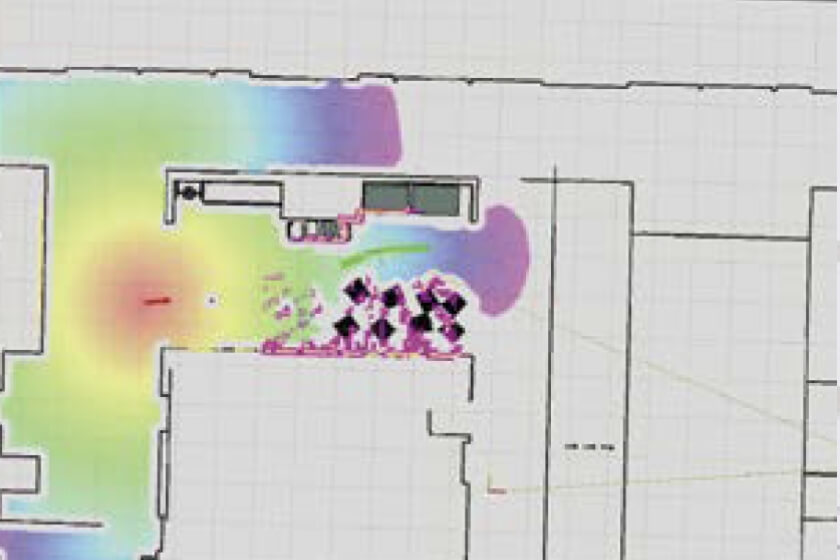
LiDAR Localizationによる自己位置認識及び自律移動と障害物の回避
SET ELEMENT-BASED
WAYPOINTS
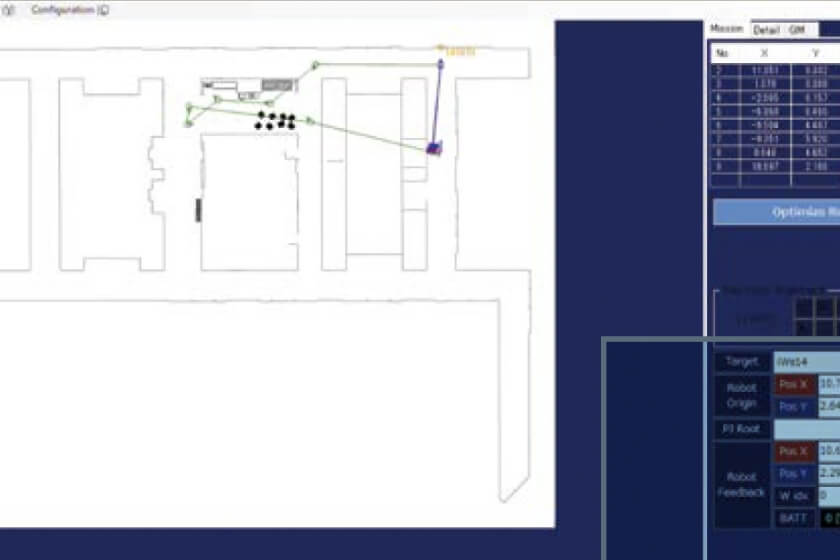
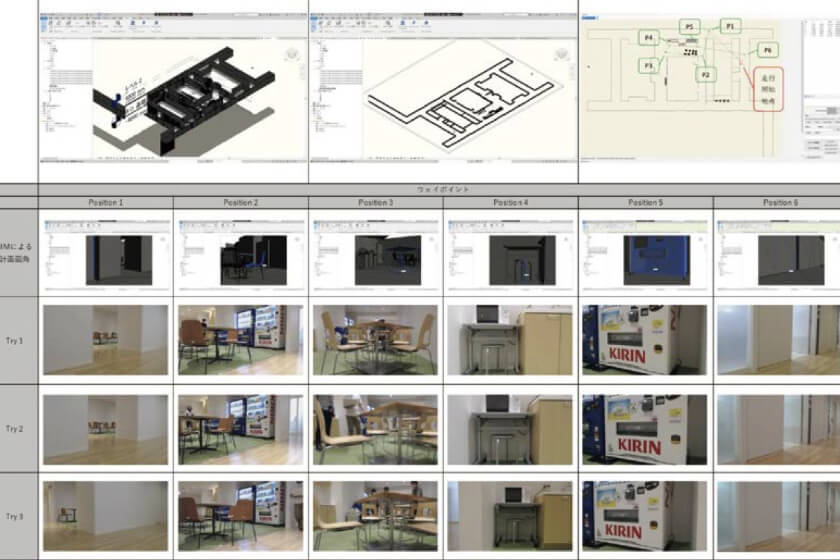
BIM/CIM上で
ロボットに行動指令
DO
TASKS
BIM/CIM属性情報に現場データを自動追加
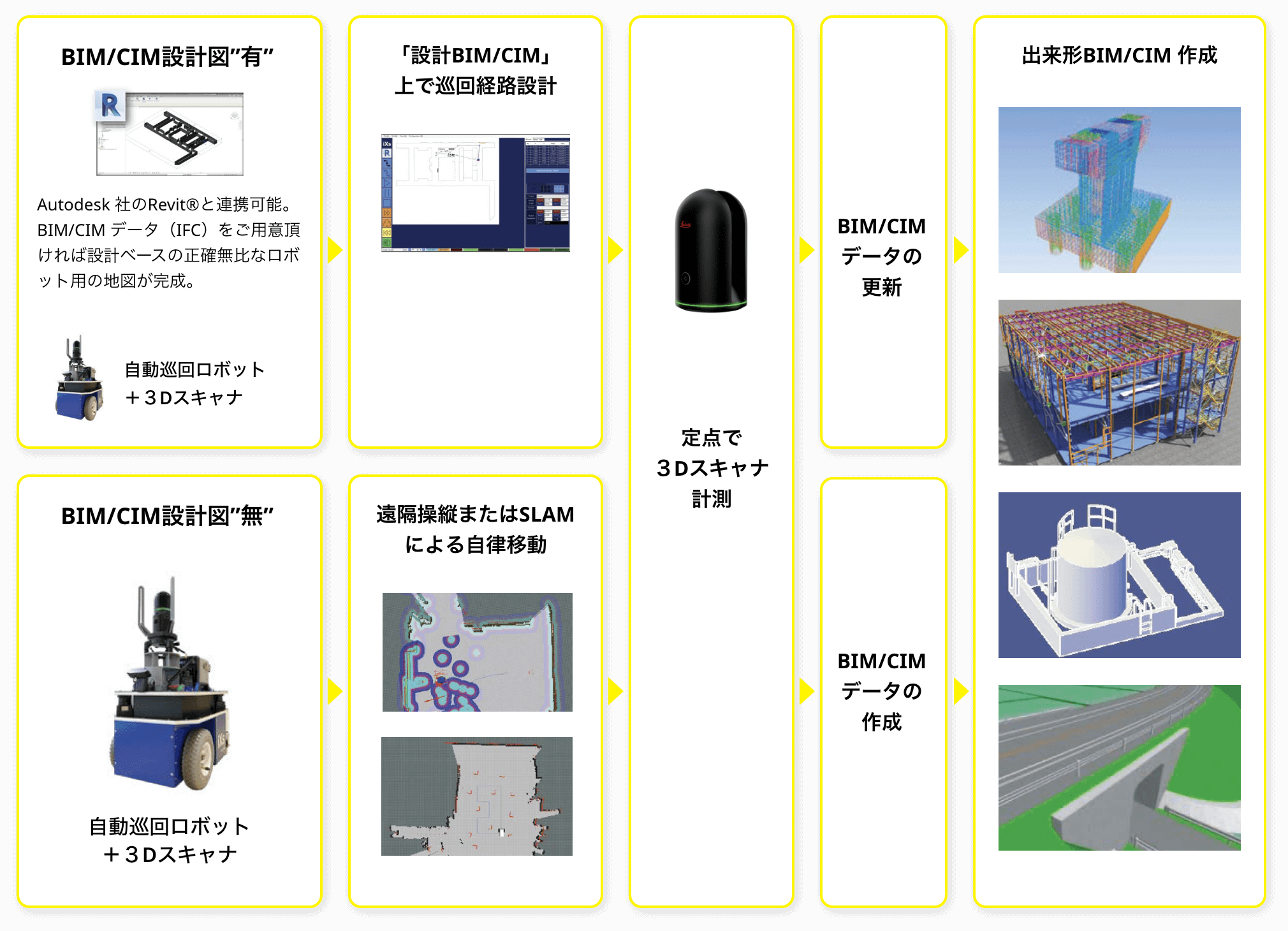
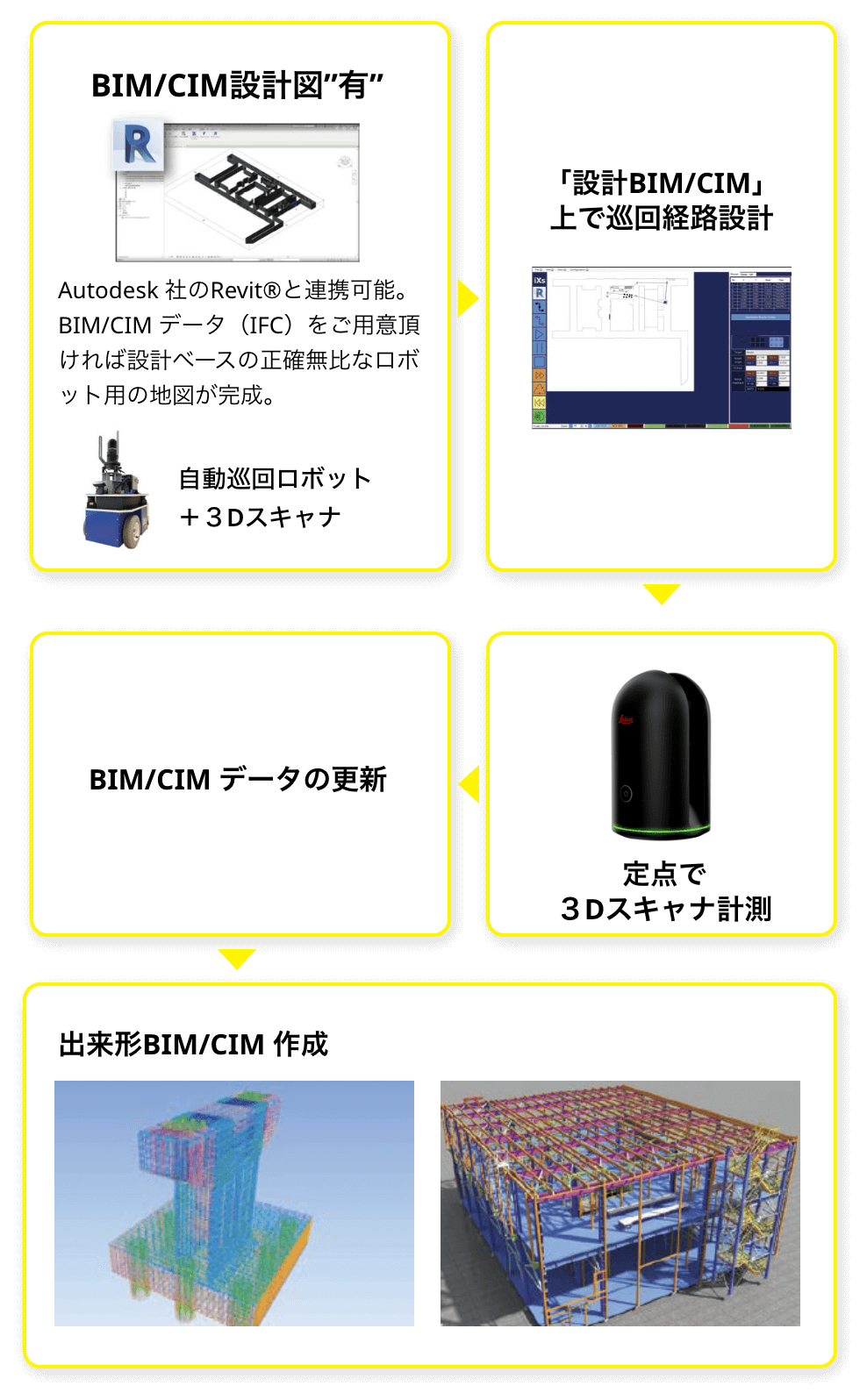
STEPBIM/CIM 作成の流れ
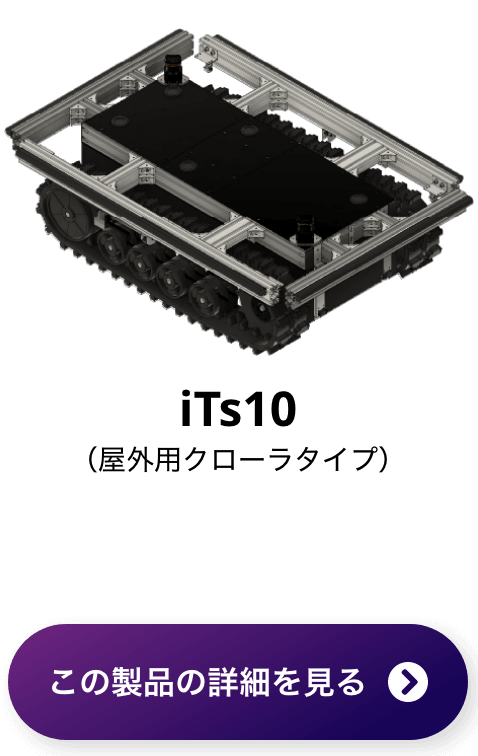
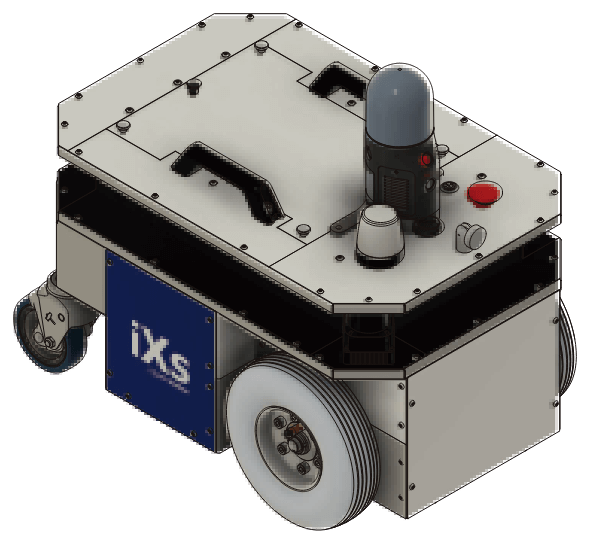
UNDERCARRIAGEiXs製ベース車両

ロボット架装追加や他システムとの連携など
ロボットシステムインテグレーターとの共同開発に対応可
USE CASEユースケース

消火設備の点検
BIM 上で点検対象の消火設備にタスクを設定。自動巡回で定期点検

壁面コンセントの検査自動化
設計BIMよりコンセントの位置を自動で抽出。施工時の検査を自動化。

重量物搬送の自動化
建設・建築現場内の重量物の移動・搬送を自動化

大規模構造物の
出来形計測無人化

天井照明の点検
その他、BIM 上で識別可能な部材を対象にした各種計測

インテグレーション
既存の移動体へBIM/CIM 連携による誘導機能をボルトオン
Original Tools
点群処理アプリケーション
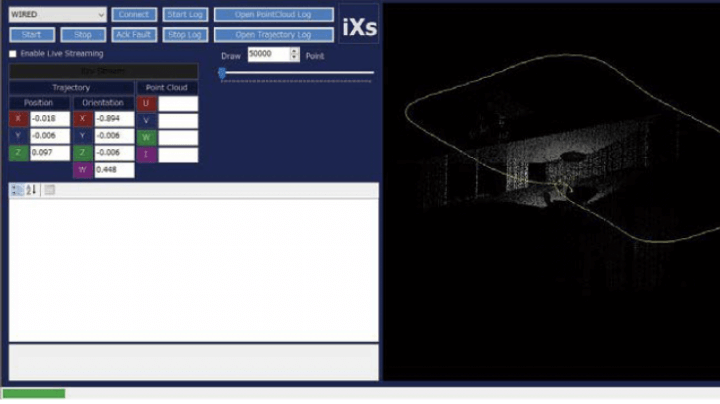
Leica Geosystems様とのパートナType2適用により、BLK ARC が認識するリアルタイム自己位置情報と間引き点群のストリーミングが可能なAPIが利用可能。これにより、あらゆる移動体がGlandSLAM®による高精度自己位置推定座標と1秒に10000点の全方位測距データが利用可能。
高性能ビューワー
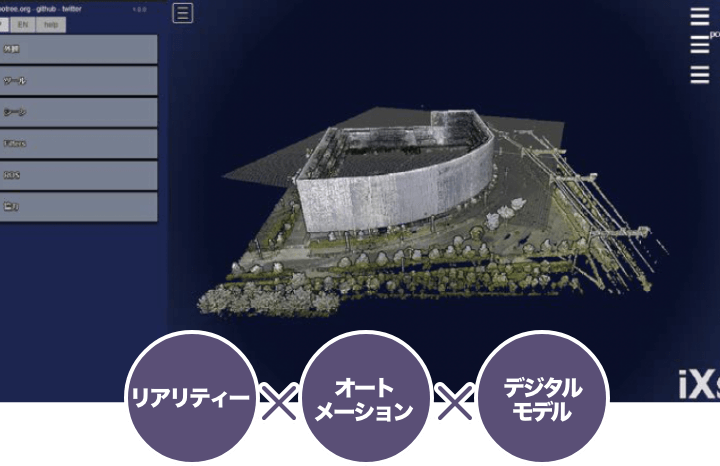
デジタルツインを実践する上で重要な、点群、ロボット、BIM/CIM の三大要素を一元的に扱える独自プラットフォーム。

SOLUTION
Eternal Operation
BLK ARCは有線給電&有線通信に対応しました。iXsの無線給電機能を搭載した移動プラットフォームiWs16/iTs10に搭載することにより電源と通信を有線接続し※1、永続的な運用を可能とします。
Not Only 4 Legged
BLK ARCを搭載できるのは四脚ロボットだけではありません。BIM連携に最適化されたiXsの自動巡回システムi-Con Walker®と併用することで上下移動の少ない車輪による滑らかな移動軌跡で点群を取得することができます。転倒による破損の可能性も非常に低くなります。
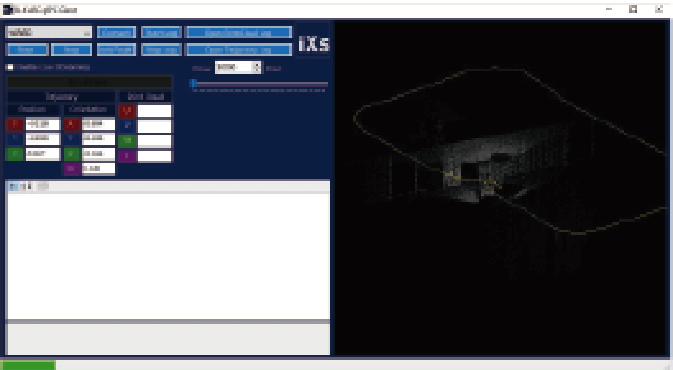
Easy Evaluation
Leica Geosystems様とのパートナType2適用によりBLK ARCが認識するリアルタイム自己位置情報と間引き点群のストリーミングが可能なAPIが利用可能となっています。これにより、ポン付けであらゆる移動体がGlandSLAM®による高精度自己位置推定座標と1秒に10000点の全方位測距データが利用可能となります。iXsはこれらを簡易に扱うためのスタンドアロンアプリをご提供できます。
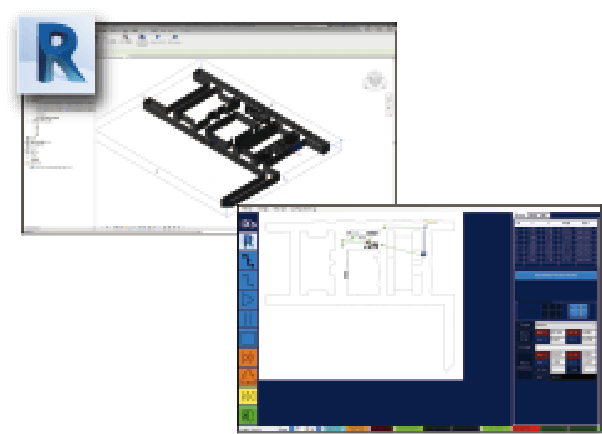
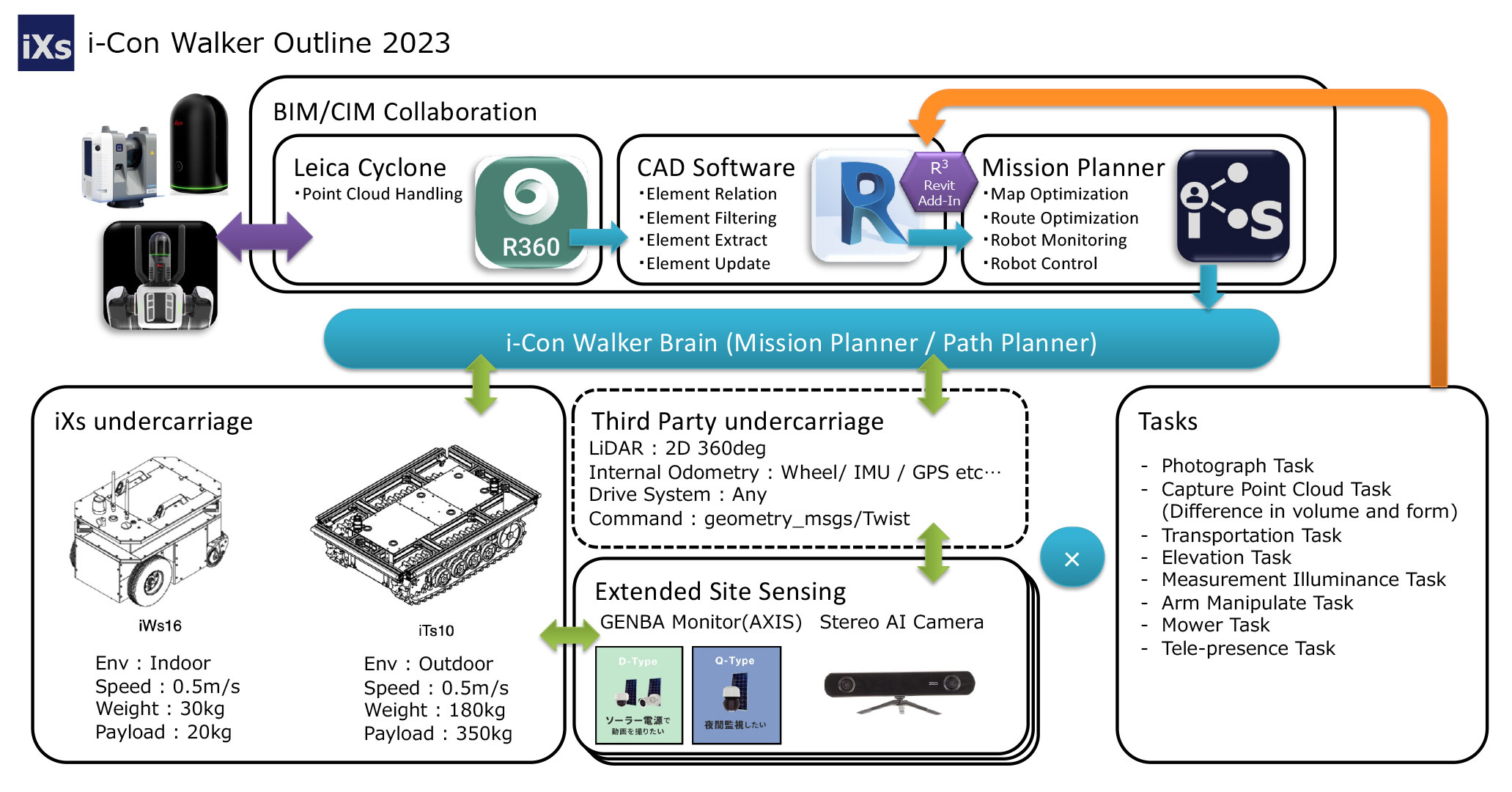
BIM/CIM Collaboration
高度なインテグレーションも弊社にお任せください。iXsではAutodesk社のRevit®と連携し※2、BIM/CIM連携を行うための準備が整っています。BIM/CIMデータ(IFC)をご用意頂ければ設計ベースの正確無比なロボット用の地図が完成します。煩わしい現地での走行前ティーチングは一切不要となりました。点検データやBLK ARCで取得した点群はBIM座標及びBIM内部材IDと紐づくことで運用前後の可用性の幅が広がります。
| iWs16 (Indoor Operation) | |
|---|---|
| Dimension | W380 x D600 x H400 |
| Speed | 0.5m/sec |
| Drive | Two Wheeled Differential |
| Weight | 42kg |
| Payload | 20kg |
| Battery | LiFePo4 24V 1.2kWh |
| iTs10 (Outdoor Operation) | |
|---|---|
| Dimension | W1000 x D1450 x H450 |
| Speed | 2km/h |
| Drive | Two Endless Track Belt |
| Weight | 180kg |
| Payload | 350kg |
| Battery | Lead 48V 1.6kWh |
- ※1:iWs16の無線給電機能はカスタム対応
- ※2:Revit本体は含まれません
Application Examples