製品・サービス



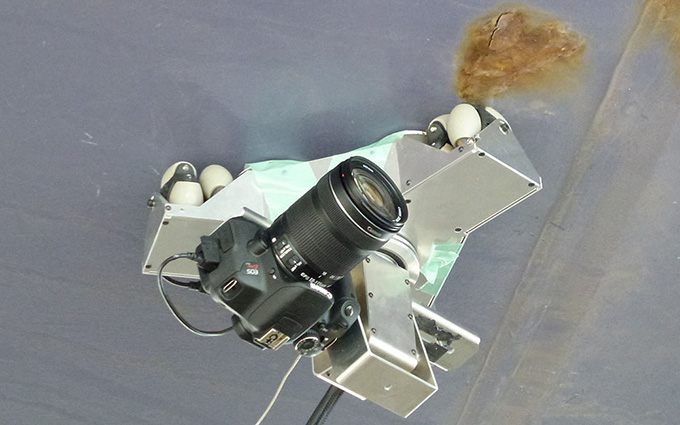









マグネット式全方位点検ロボット
MagBug
価格 オープンプライス販売レンタル
特徴
- 足場設置作業の必要なく点検可能(点検準備の簡素化・費用軽減)
- 危険を伴う高所作業が必要なくなる
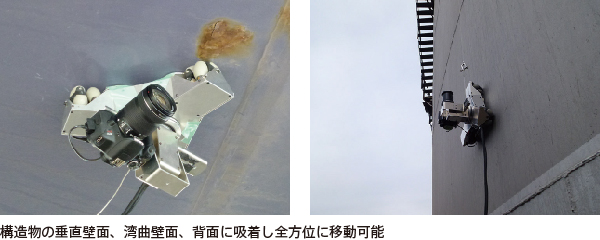
- マグネット吸着により多くの構造物に対応
- オムニホイールにより全方位移動可能(付け外し作業が不要)
- 画像検査以外にも板厚測定、超音波深傷検査が可能* (*別途センサーの搭載が必要)
点検対象インフラ
- プラント
- 煙突、タンク、溶接部、塗装
- 橋梁
- 床版点検、桁、桁端
- ビル
- 鉄鋼・鋼板
- 発電所
- 設備壁面
製品用途
- オムニホイール3輪とマグネットを組み合わせて、点検対象に磁力で張り付き全方位に移動可能
- 階段裏の溶接部や張り出しの影など、地表からは見え辛い箇所の点検を行うことが可能
- 近接目視用のカメラや、肉厚測定用の探触子等、用途に応じたセンサ類を搭載可能
- 画像データの蓄積・経年変化のデータ分析が可能
従来方法
従来方法のメリット・デメリット
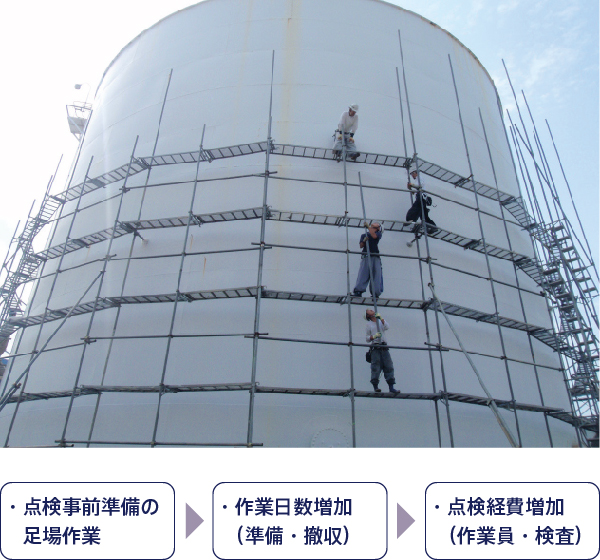
- タンクの形状・材質にとらわれずに点検が可能
- 点検事前準備(足場組み上げ)が必要になりトータル作業日数と費用負担が増加
- 危険作業が多くなり作業者確保が難しい
- 点検は、位置、構造及び設備が技術上の基準に適合しているか判断して実施
- 点検の実施時期:1年に1回以上
- 点検記録の保存期間:3年
iXs Solution
イクシス・ソリューション
- 事前の足場組み上げ作業が不要
- 技能者ではなくロボットでの高所点検作業が可能
- トータル点検作業日数の削減
- 点検データの保管・整理が容易

橋梁裏面目視検査
橋梁裏面、フェアリングおよびワイヤ端部目視検査
原油タンクウィンドガータ裏面およびタンク壁面目視検査
石化プラント貯蔵タンク壁面および溶接部目視検査
石化プラントタンク内壁面目視検査
製品詳細
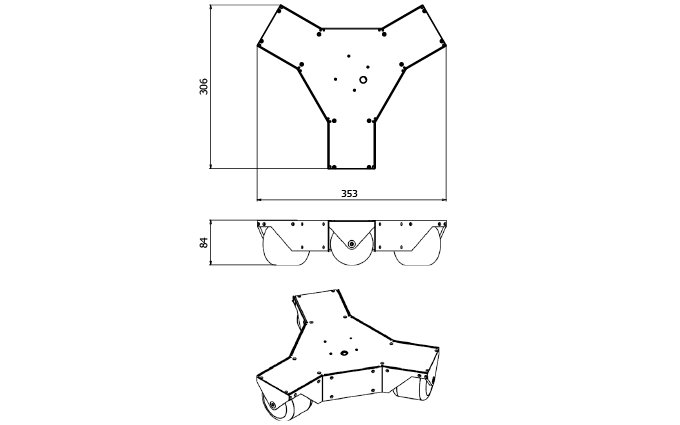
製品仕様
| 寸法 | 約Φ350(D) × 200(H)[mm](突起物除く) |
|---|---|
| 重量 | 約5.5[kg] |
| 最高速度 | 約0.5[m/s] |
| 吸着方式 | マグネット吸着 |
| 移動方式 | 三輪オムニホイールによる全方向移動式 |
| 操縦方式 | 有線による遠隔操縦方式 |
| 観察カメラ | 静止画:1220万画素動画:Full HD(16:9) 1080p(30fps) |
| 画像保存方式 | JPEG/RAW形式 |
| 動画保存方式 | MPEG4(H.264 コーデック) |
| オプション | 板圧計 / 超音波探傷器 / 無線化 |
お問い合わせ
製品に関するお問い合わせ、御見積りのご依頼は、下記のフォームより、お問い合わせください。