共同開発
設計から調達、開発、検査、現地試験、
運用サポートまでワンストップで対応。
研究用途から実運用目的のものまで、数多くのロボットや装置の開発実績があります。社内にメカ、ソフト、エレキ、AI、XR、画像処理、Web、IoT、3Dデータのエンジニアがおり、ワンストップでの対応が可能です。また、具体的な実現方法が曖昧な案件でも、実現可能な方法を提案できます。業界の課題を解決するデファクトソリューションを共同開発しませんか。
開発の流れ
STEP01
仕様検討・設計
STEP02
部材調達
STEP03
開発・組立
STEP04
検査
STEP05
現地試験
STEP06
引渡
STEP07

サポート
開発領域
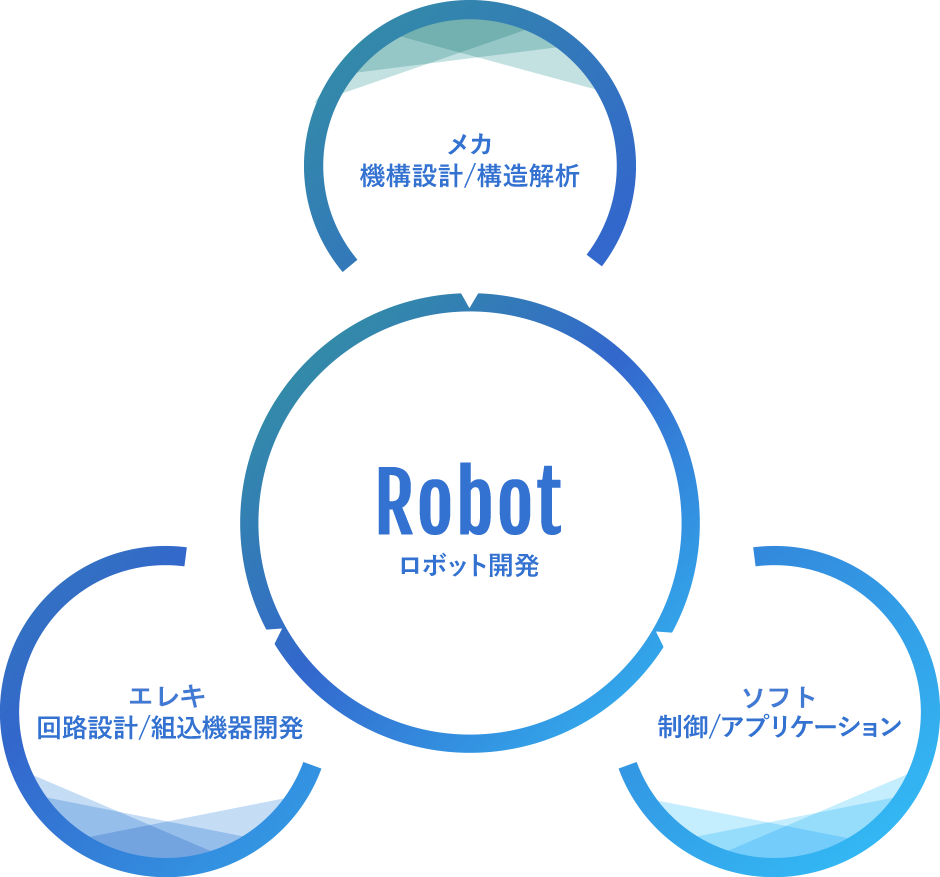
ロボット開発
メカ、ソフト、エレキまで、
ロボット開発の幅広いニーズに対応。
ロボットの要素は大きく分けてメカ、ソフト、エレキから構成されており、目的とする用途に応じて最適なシステムが都度変わります。様々なパターンのメカ構成、ネットワーク構成、ソフトウェア構成を用意しており、それらを組み合わせることで、幅広いニーズに対応することができます。
ロボット × テクノロジー
多様なスキルを持つエンジニア集団により
ワンストップで開発
メカ、ソフト、エレキ、AI、XR、画像処理、Web、IoT、3Dデータ等、多様なスキルを持つエンジニア集団によりワンストップで開発可能です。自社製品開発やこれまでの共同開発経験を活かし、迅速かつ高品質なシステムを提供します。
メディア掲載実績
日本経済新聞をはじめとする全国紙、社会・産業インフラ関連の業界紙、
ロボット・テクノロジー関連の専門紙等に掲載